luokat: Aloittelijat, Sähkömoottorit ja niiden käyttö
Katselukertojen määrä: 8782
Kommentit artikkeliin: 0
Moottorin luokittelu
Kaikki sähkömoottorit voidaan luokitella käyttötarkoituksen, odotettavissa olevien käyttötapojen ja olosuhteiden, virtalähteen tyypin jne. Perusteella useiden parametrien perusteella: toimintamomentin saamisen periaatteella, toimintatavalla, syöttövirran luonteella, vaiheohjauksen menetelmällä, herätystyyppi jne. Tarkastellaan sähkömoottorien luokittelua yksityiskohtaisemmin.

Vääntömomentin esiintyminen
Sähkömoottoreiden vääntömomentti voidaan saada jollain kahdella tavalla: magneettisen hystereesin periaatteella tai puhtaasti magnetoelektrisellä. Hystereesi moottori vastaanottaa vääntömomentin hystereesin läpi magneettisesti kiinteän roottorin magnetoinnin kääntämisen aikana, kun taas magnetoelektrinen moottori vääntömomentti on roottorin ja staattorin eksplisiittisten magneettinapojen vuorovaikutuksen tulos.

Nykyään magnetoelektriset moottorit muodostavat perustellusti leijonanosan niin monilla aloilla käytetyn sähkömoottorin kokonaismäärästä. Ne jaetaan syöttövirran luonteen perusteella seuraaviin:
-
DC-moottorit
-
Vaihtomoottorit
-
yleismoottorit.
Toisin kuin magnetoelektrinen moottori, roottorin magnetointi suhteessa sen geometrisiin akseleihin on sallittua hystereesimoottorissa, ja tämä erityinen ominaisuus ei salli magnetoelektrisen muunnoksen yleisten lakien laajentamista hystereesimoottorin synkroniseen toimintatilaan.
Katso - Yksinkertaisimman sähkömoottorin laite ja toimintaperiaate ja Kuinka tehdä yksinkertainen sähkömoottori 10 minuutissa

Moottorin luokittelu
DC-moottorit

Tasavirtakäyttöisessä moottorissa moottori itse vastaa vaiheiden vaihtamisesta. Tämä tarkoittaa, että vaikka sähkökoneelle syötetään tasavirta, laitteen sisäisten mekanismien vaikutuksesta johtuen magneettikenttä kuitenkin osoittaa pystyvän ylläpitämään roottorin vääntömomenttia (ikään kuin vaihtovirta toimisi staattorin käämityksessä).

Laite ja tasavirtamoottorin toiminta: 1 - ankkuri, 2 - akseli, 3 - keräyslevyt, 4 - harjakokoonpano, 5 - ankkurimagneettipiiri, 6 - induktorimagneettipiiri, 7 - kenttäkäämit, 8 - induktorirunko, 9 - sivupeitteet 10 - tuuletin, 11 - jalat, 12 - laakerit.
DC-moottori koostuu kiinteästä osasta, jota kutsutaan induktoriksi, ja liikkuvasta osasta, jota kutsutaan ankkuriksi. Suunnittelusta riippuen kestomagneetit voivat sijaita induktorin anturissa, mikä yksinkertaistaa suunnittelua, mutta ei anna sinun säätää moottorin magneettivuota vaikuttaen sen nopeuteen.
Liikkuvan magneettikentän luomismenetelmällä tasavirtamoottorit jaetaan:
-
venttiili (harjaton)
-
kerääjä.
Harjattomissa moottoreissa on suunnittelussa elektronisia taajuusmuuttajia, jotka suorittavat vaihekytkennät. Kollektorimoottorit on perinteisesti varustettu harjakeräinyksiköt, jotka on suunniteltu synkronoimaan puhtaasti mekaanisesti moottorin käämien teho sen liikkuvien osien pyörimisen kanssa.
Kollektorimoottorien viritys

Viritysmenetelmän mukaan kollektorimoottoreita on seuraavan tyyppisiä: riippumattomilla virityksillä kestomagneeteista tai sähkömagneeteista tai omilla virityksillä. Pysyvät magneettien viritysmoottorit sisältävät roottorin magneetteja.Itsekiertyvissä moottoreissa on erityinen ankkurikäämi roottorissa, joka voidaan kytkeä rinnakkain, sarjaan tai sekoittaa erityisen virityskäämin kanssa.
Ripple moottori
Pulssivirtamoottori on samanlainen kuin tasavirtamoottori. Ero löytyy vuorattujen inserttien läsnäolosta ytimessä sekä lisävuorattujen napojen läsnäolosta. Lisäksi aaltovirtamoottorissa on kompensointikäämi. Tällaisia moottoreita käytetään sähkövetureissa, joissa niitä yleensä käytetään tasasuuntautunut vaihtovirta.
AC-moottori
Kuten nimestä käy ilmi, vaihtovirtamoottorit saavat vaihtovirtaa. Ne ovat synkronisia ja asynkronisia.
Synkronisilla vaihtovirtamoottoreilla staattorin magneettikenttä liikkuu samalla kulmanopeudella kuin roottori, kun taas asynkronisilla moottoreilla on aina tietty viive (karakterisoituna liukumisarvolla s) - liikkeessä oleva staattorin magneettikenttä näyttää olevan roottorin edessä, mikä puolestaan on aina pyrkii kiinni häneen.
Suuritehoisissa synkronimoottoreissa (joiden kapasiteetti on satoja kilowatteja) on roottorin kenttäkäämitys. Vähemmän tehokkaiden synkronimoottorien roottorit on varustettu kestomagneeteilla, jotka muodostavat navat. Hystereesimoottorit ovat myös periaatteessa synkronisia.
Askelmoottorit - Tämä on erityinen synkronimoottoreiden luokka, jolla pyörimisnopeuden tarkka säätö on sallittu erilliseen askellaskentaan saakka.
Venttiilin synkroniset suihkumoottorit saavat taajuuden invertterin kautta.Katso tämä aihe:Nykyaikaiset synkroniset suihkumoottorit

Asynkroniset vaihtovirtamoottorit erottuvat siitä, että niiden roottorin pyörimisnopeus on aina pienempi kuin staattorin magneettikentän pyörimisnopeus. Induktio moottorit ovat yksivaihe (käynnistyskäämityksellä), kaksivaiheinen (kondensaattorimoottori koskee myös niitä), kolmivaiheinen ja monivaiheinen.
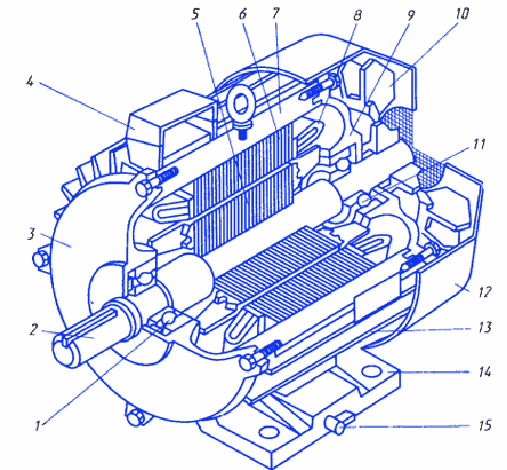
Kolmivaiheinen oravakori-induktiomoottorin suunnittelu
Asynkroninen sähkömoottori koostuu sekä kiinteästä (staattoriosasta) että liikkuvasta (roottori) osasta, joita pitävät laakerit 1 ja 11, jotka on asennettu sivupeitteihin 3 ja 9. Roottori koostuu akselista 2, johon on kiinnitetty käämityksellä varustettu magneettinen piiri 5. Moottorin staattori koostuu kotelosta 7, johon magneettinen piiri on kiinnitetty 6. Magneettipiirin 8 uriin asetetaan kolmivaiheinen käämi. Liittimen kotelon kansi 4 ja juoksupyörän suojakansi 12 on myös kiinnitetty koteloon.
Vaiheroottorissa on kolmivaiheinen käämi, staattorikäämin tyyppinen. Jotkut käämien päät on kytketty nollapisteeseen ("tähti"), kun taas toiset on kytketty liukurenkaisiin. Renkaille asetetaan harjat, jotka liukuvat roottorin käämiin. Tällä rakenteella on mahdollista kytkeä käynnistys- tai säätöreostaatti roottorin käämiin, mikä mahdollistaa roottorin piirin sähkövastuksen muuttamisen.
Katso myös - Induktio- ja tasavirtamoottoreiden erot, Erot oravakorin ja vaihelukitun induktiomoottorin välillä
Asynkroninen moottori taajuusmuuttajalla akselin pyörimisnopeuden sujuvaa hallintaa taajuuden ja syöttöjännitteen muutosten takia:

Yleisharjamoottorit
Yleiskollektorimoottori voi toimia ainakin tasavirrasta, jopa vaihtovirrasta (50 Hz). Onko sarjaheräte, käytetään kotitalouksien sähkölaitteissajoissa vaaditaan tavanomaisilla vaihtovirran moottoreilla 3000 rpm suurempaa pyörimisnopeutta. Sellaisten moottorien teho ei yleensä ylitä 200 wattia. löydetty tyristorin ohjaus yleinen moottorin nopeus.
Parannettu versio yleismoottorista on synkroninen moottori, jossa on roottorin asennon anturi, jossa kollektorin rooli on elektronisella taajuusmuuttajalla.
Muita hyödyllisiä artikkeleita aiheesta:
Sähkömoottorityypit ja niiden työn periaatteet
Induktorimoottorien ominaisuudet
Kuinka määrittää sähkömoottorin pyörimisnopeus
Kuinka tarkistaa sähkömoottori
Kuinka purkaa induktiomoottori
Katso myös osoitteesta electro-fi.tomathouse.com
: